
技術(shù)文章
Technical articles 熱門搜索:
P760/01_2760nm單模垂直腔面發(fā)射激光器
VCSEL-20-M激光控制驅(qū)動(dòng)器
ZNSP25.4-1IR拋光硫化鋅(ZnS)多光譜(透明)窗片 0.37-13.5um 25.4X1.0mm(晶體/棱鏡
Frequad-W-CW DUV 單頻連續(xù)激光器 213nm 10mW Frequad-W
HB-C0BFAS0832x4 QPSK C波段相干混頻器(信號(hào)解調(diào)/鎖相放大器等)
ER40-6/125截止波長(zhǎng)1300nm 高摻雜EDF摻鉺光纖
SNA-4-FC-UPC日本精工法蘭FC/UPC(連接器/光纖束/光纜)
GD5210Y-2-2-TO46905nm 硅雪崩光電二極管 400-1100nm
WISTSense Point 緊湊型高精度光纖傳感器解調(diào)儀(信號(hào)解調(diào)/鎖相放大器等)
CO2激光光譜分析儀
1030nm超短脈沖種子激光器PS-PSL-1030
FLEX-BF裸光纖研磨機(jī)
NANOFIBER-400-9-SA干涉型單模微納光纖傳感器 1270-2000nm
350-2000nm 1倍紅外觀察鏡
高能激光光譜光束組合的光柵 (色散勻化片)
S+C+L波段 160nm可調(diào)諧帶通濾波器
熱門搜索:
P760/01_2760nm單模垂直腔面發(fā)射激光器
VCSEL-20-M激光控制驅(qū)動(dòng)器
ZNSP25.4-1IR拋光硫化鋅(ZnS)多光譜(透明)窗片 0.37-13.5um 25.4X1.0mm(晶體/棱鏡
Frequad-W-CW DUV 單頻連續(xù)激光器 213nm 10mW Frequad-W
HB-C0BFAS0832x4 QPSK C波段相干混頻器(信號(hào)解調(diào)/鎖相放大器等)
ER40-6/125截止波長(zhǎng)1300nm 高摻雜EDF摻鉺光纖
SNA-4-FC-UPC日本精工法蘭FC/UPC(連接器/光纖束/光纜)
GD5210Y-2-2-TO46905nm 硅雪崩光電二極管 400-1100nm
WISTSense Point 緊湊型高精度光纖傳感器解調(diào)儀(信號(hào)解調(diào)/鎖相放大器等)
CO2激光光譜分析儀
1030nm超短脈沖種子激光器PS-PSL-1030
FLEX-BF裸光纖研磨機(jī)
NANOFIBER-400-9-SA干涉型單模微納光纖傳感器 1270-2000nm
350-2000nm 1倍紅外觀察鏡
高能激光光譜光束組合的光柵 (色散勻化片)
S+C+L波段 160nm可調(diào)諧帶通濾波器
 更新時(shí)間:2025-12-23
更新時(shí)間:2025-12-23 點(diǎn)擊次數(shù):26
點(diǎn)擊次數(shù):26
封面展示了低軌衛(wèi)星通過(guò)激光鏈路構(gòu)建星間通信網(wǎng)絡(luò)的情景。多顆小衛(wèi)星圍繞地球運(yùn)行,通過(guò)紅色激光束進(jìn)行點(diǎn)對(duì)點(diǎn)高速數(shù)據(jù)傳輸,不同于傳統(tǒng)無(wú)線電通信,激光通信具備傳輸速率高、延遲低、抗干擾強(qiáng)等優(yōu)點(diǎn),能滿足未來(lái)高速網(wǎng)絡(luò)的需求。地球表面的網(wǎng)格結(jié)構(gòu)象征著網(wǎng)絡(luò)覆蓋與服務(wù)能力,展現(xiàn)出“空天地一體化"通信系統(tǒng)的雛形。激光通信正在為構(gòu)建更快、更穩(wěn)定的衛(wèi)星互聯(lián)網(wǎng)提供關(guān)鍵支撐,標(biāo)志著空間通信技術(shù)的飛躍發(fā)展。
一、背景介紹
隨著低軌衛(wèi)星互聯(lián)網(wǎng)的發(fā)展,星間激光通信作為實(shí)現(xiàn)高速、低延遲數(shù)據(jù)傳輸?shù)年P(guān)鍵技術(shù),正逐漸成為新一代衛(wèi)星網(wǎng)絡(luò)的核心。然而,低軌衛(wèi)星具有軌道高度低、運(yùn)動(dòng)速度快等特點(diǎn),導(dǎo)致激光鏈路在建立和保持過(guò)程中面臨更大的挑戰(zhàn)。其中,頻繁的星間接入與退出使得激光通信終端必須具備快速、高精度的鏈路建立與維持能力。
為了實(shí)現(xiàn)快速建鏈,激光束的指向精度要求,衛(wèi)星的激光建鏈過(guò)程猶如在數(shù)百公里外拿著激光筆照射快速移動(dòng)的對(duì)端目標(biāo),任何微小的姿態(tài)擾動(dòng)、軌道預(yù)報(bào)誤差或光軸誤差都可能導(dǎo)致通信中斷。因此,提高激光終端在動(dòng)態(tài)環(huán)境下的快速建鏈與穩(wěn)鏈能力,成為當(dāng)前激光通信系統(tǒng)研究的關(guān)鍵方向。指向誤差修正技術(shù),是解決這一問(wèn)題的核心技術(shù)手段。通過(guò)恒星標(biāo)校和星間標(biāo)校結(jié)合,有望顯著提升系統(tǒng)對(duì)鏈路擾動(dòng)的魯棒性,實(shí)現(xiàn)低軌衛(wèi)星網(wǎng)絡(luò)中高效、穩(wěn)定的激光通信鏈路動(dòng)態(tài)管理與控制,支撐未來(lái)大規(guī)模星座系統(tǒng)的高性能運(yùn)行。
二、創(chuàng)新工作
上海光學(xué)精密機(jī)械研究所侯霞、魯紹文團(tuán)隊(duì)針對(duì)星載激光通信中快速建鏈的應(yīng)用需求,提出了一種基于參數(shù)尋優(yōu)的激光通信終端指向在軌快速標(biāo)校方案。該方案綜合應(yīng)用復(fù)雜的坐標(biāo)系轉(zhuǎn)換和誤差修正矩陣,實(shí)現(xiàn)了對(duì)理論指向矢量的高精度修正,采用了斐波那契查找算法結(jié)合最小二乘法的尋優(yōu)策略,提高了標(biāo)校過(guò)程的收斂速度和精度,實(shí)現(xiàn)了對(duì)激光通信終端光軸的快速、精確標(biāo)校。修正后的指向誤差結(jié)果如圖1所示,最小0.02 mrad,大0.81 mrad,平均誤差為0.42 mrad。
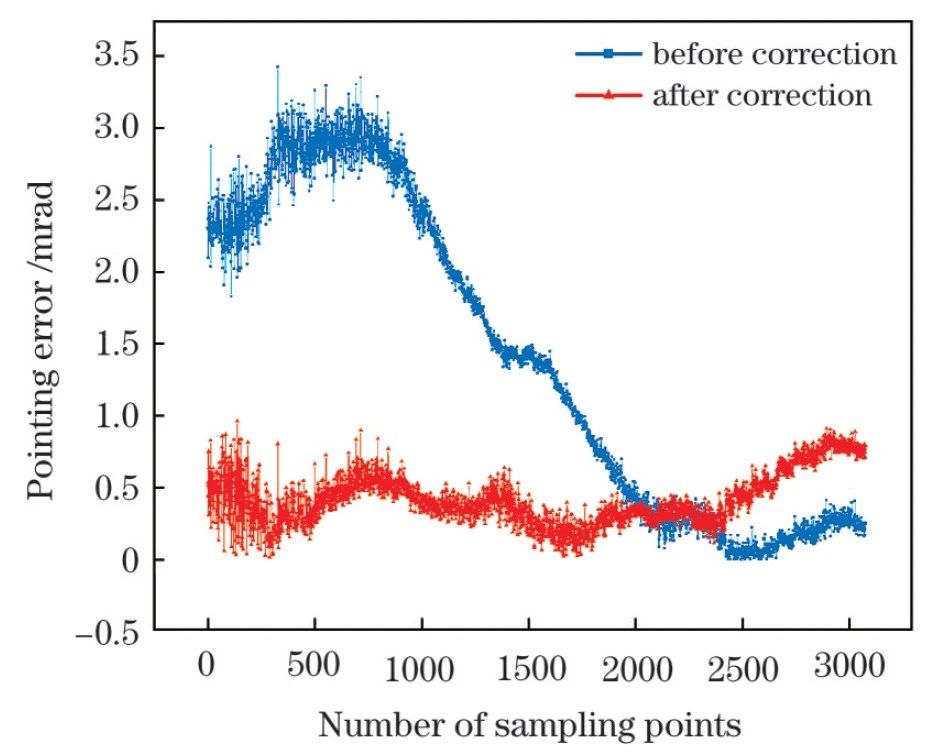
圖1 指向誤差修正擬合曲線
課題組在衛(wèi)星上進(jìn)行了多次在軌驗(yàn)證,實(shí)現(xiàn)了同軌道面上衛(wèi)星之間最小指向誤差為0.10 mrad,0.95 mrad,平均誤差為0.46 mrad,如圖2(a)所示;異軌道面衛(wèi)星之間最小指向誤差為0.01 mrad,1.46 mrad,平均誤差為0.51 mrad,如圖2(b)所示,在軌驗(yàn)證結(jié)果與指向偏差修正結(jié)果吻合。階段性在軌驗(yàn)證實(shí)驗(yàn)表明,對(duì)激光終端指向偏差修正后,指向殘差約為0.5 mrad,平均捕獲時(shí)間從最初大于8 min減小到小于15 s,不超過(guò)30 s,與國(guó)內(nèi)其它在軌建鏈驗(yàn)證試驗(yàn)(θFOU<1.5 mrad)相比具有顯著提升。
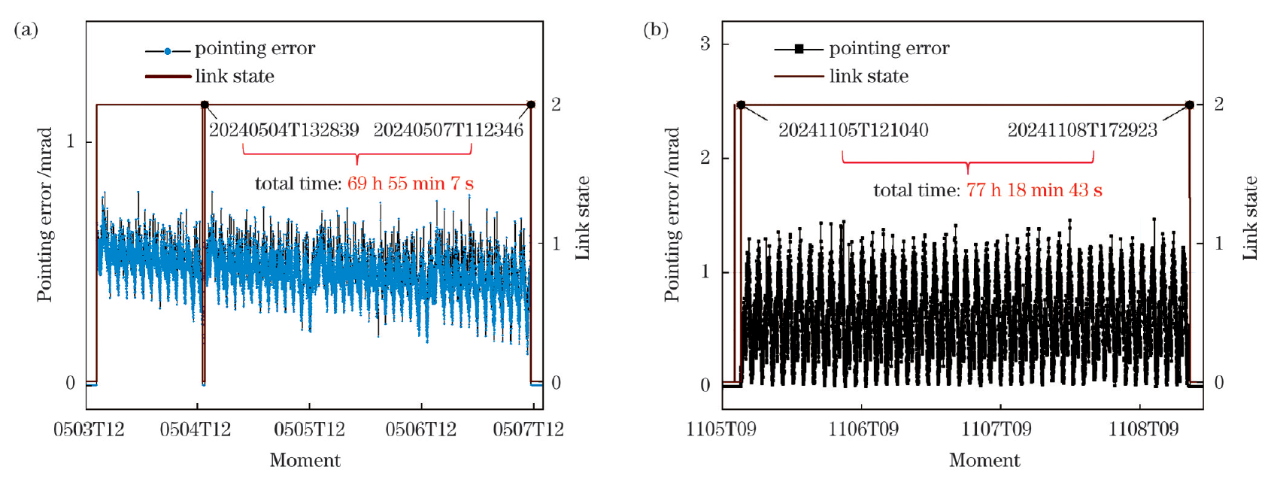
圖2 星載激光通信終端建鏈測(cè)試。(a)同軌道面;(b)異軌道面
從修正后的指向誤差驗(yàn)證數(shù)據(jù)可知,同軌道面衛(wèi)星間的指向精度總體上優(yōu)于異軌道面衛(wèi)星間,這與軌道特性相吻合,同軌道面建鏈,電機(jī)的動(dòng)態(tài)范圍小,指向也更加精確;異軌道面間的建鏈,動(dòng)態(tài)范圍更大,需要修正的方位、俯仰電機(jī)指向位置也更廣。同時(shí),這兩種鏈路的指向誤差都存在周期性變化的特點(diǎn),這是由軌道周期特性、軌道外流對(duì)于衛(wèi)星艙板的形變等多方面因素所引起的。同時(shí),經(jīng)多次建鏈試驗(yàn)結(jié)果統(tǒng)計(jì),指向誤差較大的時(shí)候均是衛(wèi)星進(jìn)出陰影區(qū)的時(shí)候,衛(wèi)星進(jìn)出陰影區(qū)時(shí),溫度、能源、傳感器和動(dòng)力學(xué)環(huán)境的變化共同作用,導(dǎo)致指向誤差增大。
三、總結(jié)與展望
在后續(xù)工作中,團(tuán)隊(duì)將聚焦于高精度指向?qū)崟r(shí)修正模型的建立與優(yōu)化,進(jìn)一步將系統(tǒng)指向殘差從當(dāng)前水平減小至激光束散角量級(jí),實(shí)現(xiàn)秒級(jí)建鏈功能。該研究將顯著提升激光鏈路的穩(wěn)定性和可用性,為基于激光星間鏈路的衛(wèi)星互聯(lián)網(wǎng)建設(shè)提供關(guān)鍵技術(shù)支撐。
參考文獻(xiàn): 中國(guó)光學(xué)期刊網(wǎng)
您好,可以免費(fèi)咨詢技術(shù)客服[Daisy]
筱曉(上海)光子技術(shù)有限公司
歡迎大家給我們留言,私信我們會(huì)詳細(xì)解答,分享產(chǎn)品鏈接給您。
免責(zé)聲明:
資訊內(nèi)容來(lái)源于互聯(lián)網(wǎng),不代表本網(wǎng)站及新媒體平臺(tái)贊同其觀點(diǎn)和對(duì)其真實(shí)性負(fù)責(zé)。如對(duì)文、圖等版權(quán)問(wèn)題存在異議的,請(qǐng)聯(lián)系我們將協(xié)調(diào)給予刪除處理。行業(yè)資訊僅供參考,不存在競(jìng)爭(zhēng)的經(jīng)濟(jì)利益。
 當(dāng)前位置:
當(dāng)前位置:
